Raspberry pi 3B+を買って初めての作品。カメラをリモートデスクトップで見ながらサーボモーターで動かしてみた。

3Dプリンターで作成した土台にサーボモーター2台とカメラ、ラズパイにモバイルバッテリーを搭載してます。

↑これが土台
サーボモーターは360°タイプを使用、ラズパイの17ピンと18ピンと接続した。
カ
メラアプリとしてはguvcviewを使用しました。※インストールその他はこの記事参照おねがいします画像のタイムラグはありますが 3B+になって動きがきびきびした気がします。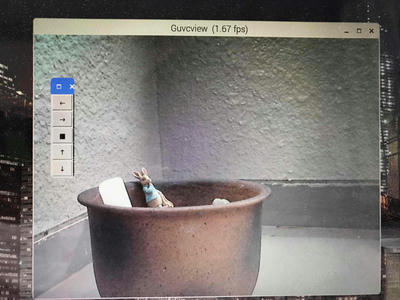 左側のボタンはtkinterで作成しました。↓こんな感じです。
左側のボタンはtkinterで作成しました。↓こんな感じです。import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
from tkinter import *
tk = Tk()
gp_out = 17
gp_out2 = 18
GPIO.setup(gp_out, GPIO.OUT)
GPIO.setup(gp_out2, GPIO.OUT)
servo = GPIO.PWM(gp_out, 50)
servo2 = GPIO.PWM(gp_out2, 50)
servo.start(0.0)
servo2.start(0.0)
def hello():
servo.ChangeDutyCycle(1.5)
servo2.ChangeDutyCycle(1.5)
def hello2():
servo.ChangeDutyCycle(12.5)
servo2.ChangeDutyCycle(12.5)
def hello3():
servo.stop(0.0)
servo2.stop(0.0)
servo.start(0.0)
servo2.start(0.0)
def hello4():
servo2.ChangeDutyCycle(12.5)
servo.ChangeDutyCycle(1.5)
def hello5():
servo2.ChangeDutyCycle(1.5)
servo.ChangeDutyCycle(12.5)
btn =Button(tk, text="←", command=hello)
btn.pack()
btn =Button(tk, text="→", command=hello2)
btn.pack()
btn =Button(tk, text="■", command=hello3)
btn.pack()
btn =Button(tk, text="↑", command=hello4)
btn.pack()
btn =Button(tk, text="↓", command=hello5)
btn.pack()
ボタンで前後、左右のサーボモーターを動かします。
リモートデスクトップでやるとほとんどラジコンですね・・。
androidタブレットでもXrdpを入れると動かすことができます。
まだまだ3B+が”買い”ですとは言えませんが、今後も性能の違いを確かめていきたいと思います!!
 [0回]
[0回]