久々にaruduinoいじってみました。 最近esp32とかM5stackとかばかり使っていたんですが、今回昔買ってそのままにしていたイーサネットシールドを動かしてみました。
まずはPCとLANケーブルをさしてIPの設定をしていきます。

下記のようなリンクを参考に接続しているPCを固定IPアドレスにします。
参考 ※
Win10の場合です。
それではサンプルのスケッチをいじっていきます。
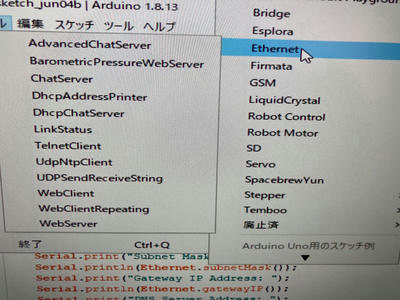
EthernetのwebServerをやってみます。
これはarduinoのアナログ信号をブラウザ上で表示するものです。変更するところは2行だけです。0X・・とある行はシールド本体に書かれているMACアドレスを入力してください。※それぞれ0Xの後に入力します。
IPはPCで設定した固定アドレスの最後を変えてarduinoのIPを指定します。
PCが192,168,1,1であれば192,168,1,10といった具合です。この内容で書き込んでブラウザで指定したIPを叩くと…。
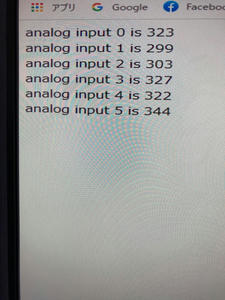
こんな感じで出てくればOKです。
もう一つのサンプルchat serverをやってみます。
これはPCのコマンドプロンプトからtelnet通信ができるというものです。
まずはtelnetを有効にします。下記を参考にしてください。
インストール方法arduinoに書き込んだらシリアルモニタでサブネットマスクとゲートウェイを確認します。
確認ができたらサンプルスケッチのchat serverへ入力してください。
最終的に再度シリアルモニタを開くとchat serverのIPがわかります。
そのIPをコマンドプロンプトで telnet 192.168.1.10 と叩くと完成です。
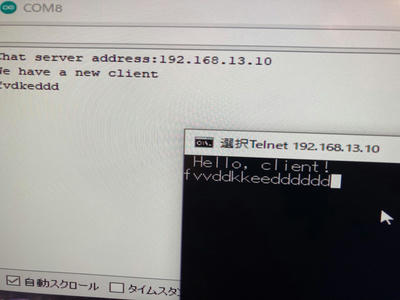
コマンドプロンプトで文字を入力するとシリアルモニタにも反映されていきます。
今回はarduinoへイーサネットシールドをつけてサンプルスケッチをやってみました。
ちょっとまだ何に使っていいかわかりませんが… 応用できればやってみたいと思います!!
 [0回]
[0回]