体温を測るためにMLX90614非接触温度センサモジュールを購入していたんですが放置していました。(けっこう高かったのですが…)
arduinoでは多かったのですがラズパイで使用する記事が少なかったので連休を利用して使い方をまとめてみました。

家にある非接触タイプの体温計と同じセンサーみたいですね。
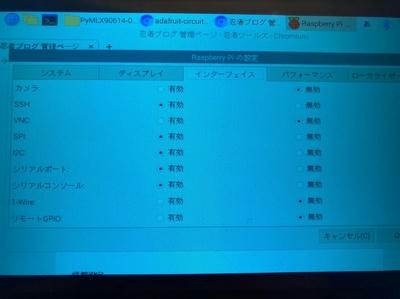
まずはラズパイの設定でI2Cを有効にします
次にここからPyMLX90614-0.0.3.tar.gzをダウンロードして解凍します
https://pypi.org/project/PyMLX90614/#files
必要ない場合もありますが下記コマンドでライブラリをインストールしていきます。
cd /home/pi/PyMLX90614-0.0.3
sudo apt-get install python-setuptools
sudo apt-get install -y i2c-tools
sudo python setup.py install
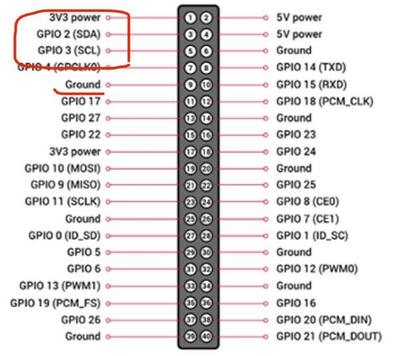
配線はモジュールのVILを3V、GNDをGround、SDAはSDA、SCLはSCLへつないでください。
下記コマンドで5aとでてきたら接続が正常です。
sudo i2cdetect -y 1
あとは/home/pi/PyMLX90614-0.0.3フォルダ内で下記pythonプログラムを実行してください。
実行すると外気温度と放射温度がでてきます。
26.150000000000034
34.85000000000002
終わってみれば簡単ですが、参考にできる記事が少なく苦労しました。
うーん、やっぱりラズパイじゃなくてM5stickCとかでつかったほうがいいかな… 小型化したいです。
 [0回]
[0回]